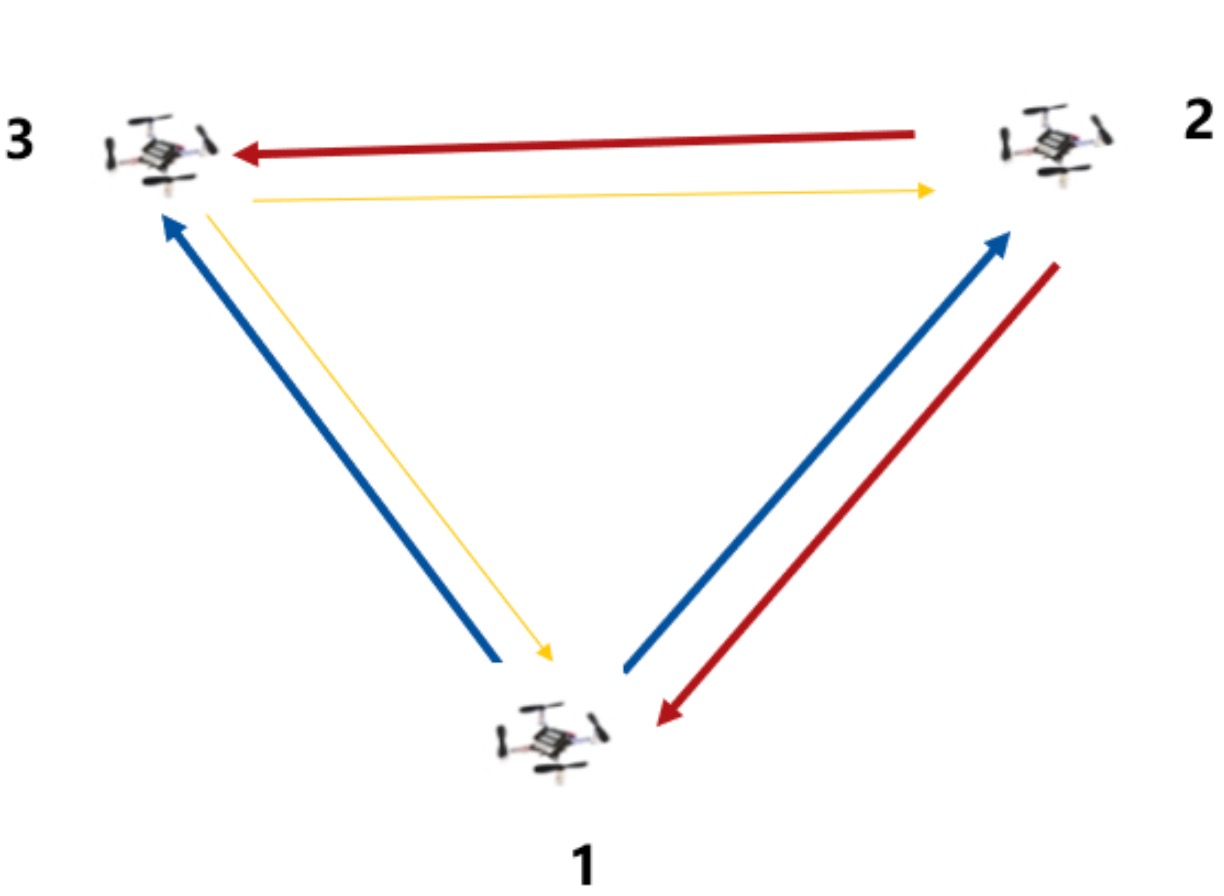
无参考中心的分布式编队控制(Decentralized Formation Control without a Reference Center)是一种控制策略,主要应用于多智能体系统,如无人机、机器人等,在没有中央控制器或参考点的情况下,实现自组织的编队行为。与传统的集中式控制方法不同,在无参考中心的控制中,每个智能体仅与其邻居进行通信和交互,而不依赖于一个全局的参考点或领导者。
无参考中心的分布式编队控制(Decentralized Formation Control without a Reference Center)是一种控制策略,主要应用于多智能体系统,如无人机、机器人等,在没有中央控制器或参考点的情况下,实现自组织的编队行为。与传统的集中式控制方法不同,在无参考中心的控制中,每个智能体仅与其邻居进行通信和交互,而不依赖于一个全局的参考点或领导者。
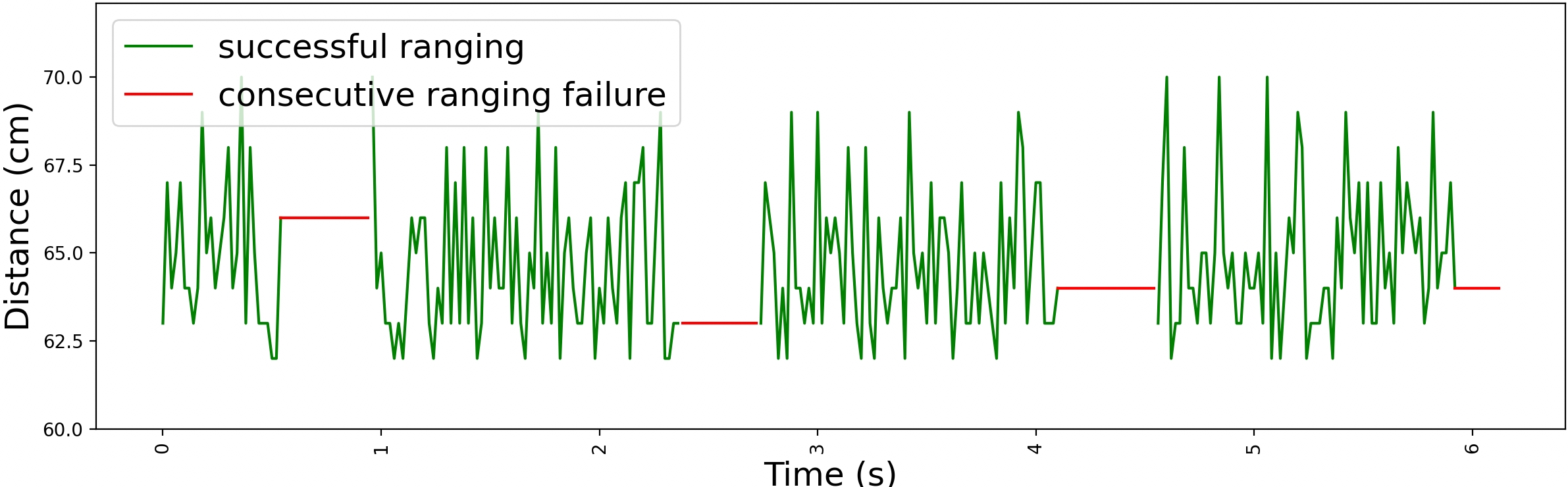
由于无人机在测距中总会在一段时间内处于碰撞阶段,这对于正在进行相对定位的无人机集群的影响是毁灭性的,由于测距长时间的失败,无人机无法准确的计算其他无人机相对于自身的位置,导致无人机按照错误的协同控制指令飞行,最终集群飞行失败并且会发生内部碰撞。下面主要研究了如何通过对无人机发包的周期进行随机化从而减弱连续测距失败现象。

Crazyflie无人机中使用的操作系统,包含任务、列表、队列、中断以及信号量知识。
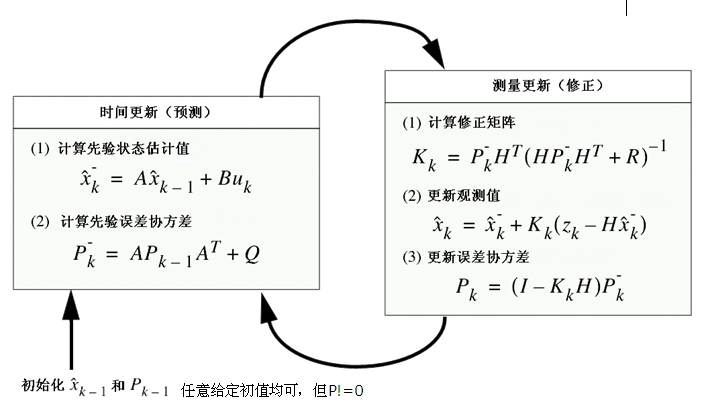
卡尔曼滤波器是最优化递归的数字处理算法,卡尔曼滤波的一个典型实例是从一组有限的,包含噪声的,对物体位置的观察序列(可能有偏差)预测出物体的位置的坐标及速度。在很多工程应用(如雷达、计算机视觉)中都可以找到它的身影。