
Makefile 是一种自动化构建工具,通过定义一系列的规则和依赖关系,帮助开发者编译项目。
当运行 make 命令时,Makefile 会检查目标文件是否需要更新。如果目标文件的依赖文件有变化(例如源代码更新),Make 会执行对应的命令来更新目标文件。如果目标文件已经是最新的,Make 会跳过该目标。
Makefile 是一种自动化构建工具,通过定义一系列的规则和依赖关系,帮助开发者编译项目。
当运行 make 命令时,Makefile 会检查目标文件是否需要更新。如果目标文件的依赖文件有变化(例如源代码更新),Make 会执行对应的命令来更新目标文件。如果目标文件已经是最新的,Make 会跳过该目标。
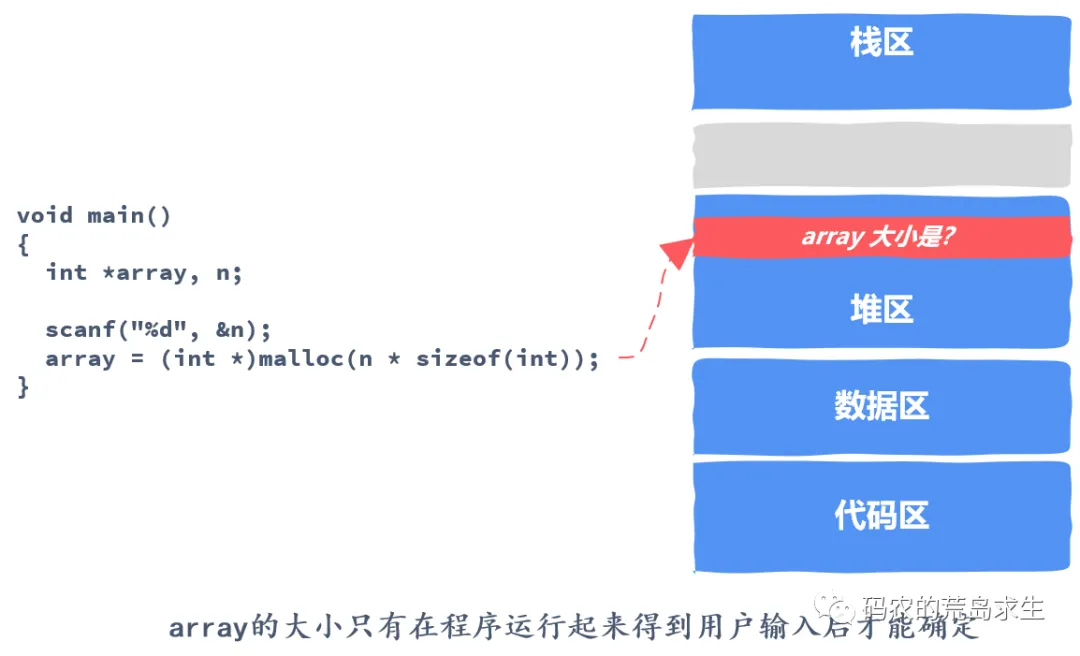
程序员经常使用的内存申请方式被称为动态内存分配,Dynamic Memory Allocation。我们为什么需要动态的去进行内存分配与释放呢?
答案很简单,因为我们不能提前知道程序到底需要使用多少内存。那我们什么时候才能知道呢?答案是只有当程序真的运行起来后我们才知道。
 期望最大化EKF算法结合了EM算法和EKF的特点,主要用于在非线性动态系统中同时估计状态和参数。其基本步骤如下:
期望最大化EKF算法结合了EM算法和EKF的特点,主要用于在非线性动态系统中同时估计状态和参数。其基本步骤如下:
初始化参数和状态。
E步骤:使用当前参数估计,通过EKF估计状态和协方差。
M步骤:在E步骤中估计的状态基础上,使用EM算法更新参数估计。
重复步骤2和3,直到参数和状态估计收敛。
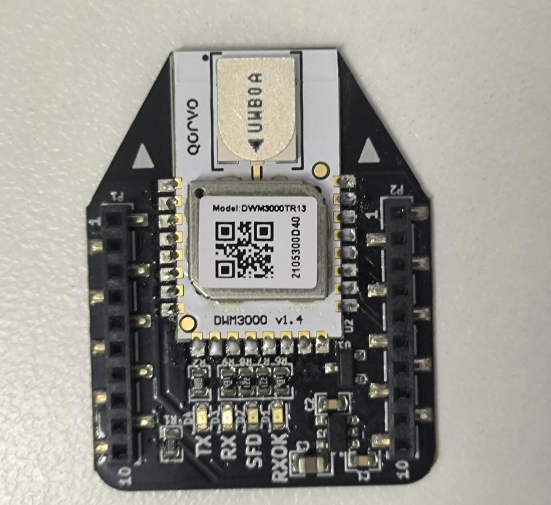
DWM3000在stm32上的驱动实现指南。